四自由度码垛机器人运动控制方案设计(毕业论文11200字,电路图)
摘要
码垛机是将已装入容器的纸箱,按一定排列码放在托盘、栈板(木质、塑胶)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存。本设备采用PLC+触摸屏控制,实现智能化操作管理,简便、易掌握。可大大地减少劳动力和降低劳动强度。码垛机是输送机输送来的料袋、纸箱或是其它包装材料按照客户工艺要求的工作方式自动堆叠成垛,并将成垛的物料进行输送的设备。
码垛技术是物流自动化技术领域的一门新兴技术,所谓的码垛就是按照集成单元化思想,将一件件物料按照一定的模式堆码成垛,以便使单元化的物垛实现物料的搬运、装卸、运输、存储、等物流活动。在物体的运输过程中除了散装的物体和液体外,一般的物体都是以码垛的形式进行存储或组装,这样即可承载更多的物体,又可节省空间。随着物流的飞速发展以及科技的突飞猛进,码垛技术应用越来越广泛,尤其是在环境较恶劣或人工很难做到的情况下。包装的种类、工厂环境和客户需求,物体的安全性等,使得码垛成为越来越艰巨的任务,为了克服这些困难,码垛设备的各个方面都在不断地发展改进,如从机械手到操纵它的软件,现在对灵活性的需求也在不断增加。 码垛机器人是一种具有特殊功能的垂直多关节型机器人,广泛应用于石油、化工、食品加工、饮料等领域。可通过主计算机根据不同的物料包装、堆垛顺序、层数等参数进行设置实现不同型包装的码垛要求。而机器人码垛技术是自动化物料后处理成套设备中的关键技术之一,随着自动称重、包装技术的发展和性能指标的提高,对码垛技术也提出了更高的要求。码垛机器人手臂应具有一定的刚度和强度,防止弹性变形和断裂。手腕搬运的东西较重,这对其精度提出了更高要求。 为满足自动化生产线产品搬运及码垛的要求,本课题要求设计一种码垛机器人的机械结构部分。结合机、电、软、硬件各自特点和优势互补的基础上,对码垛机器人整体机械结构、传动系统进行分析和设计,提出了一套经济型设计方案。以西门子S7200系类CPU226CN为控制核心,运动控制卡为脉冲发生器的四自由度码垛机器人的控制系统。其中伺服驱动器接受来自运动控制卡的脉冲进行动作。
Introduction
Palletizing technology is an emerging technology in the field of logistics automation technology, is in accordance with the so-called stacking integrated unit of thought, the piece of material in accordance with a certain pattern stacking a pile so that the unit of composition stack to achieve material handling , handling, transportation, storage, and other logistics activities. During transport objects in addition to objects and liquid bulk, in general, objects are stored in the form of palletizing or assembly, so you can carry more objects, but also save space. With rapid advances in technology and the development of logistics, palletizing technology more widely, especially in the environment has become more difficult to do bad or artificial situation. Type of packaging, factory environment and customer needs, such as security objects, making palletizing become increasingly difficult task, in order to overcome these difficulties in all aspects, palletizing equipment are constantly developing improvements, such as from the robot to manipulate Its software, now the demand for flexibility is also increasing. Palletizing robot is a vertical articulated robot has a special function, widely used in petroleum, chemical, food processing, beverages and other fields. Can be set to achieve the requirements of different types of packaging palletizing by the host computer, depending on the packaging material, stacking sequence, the number of layers and other parameters. The robotic palletizing technology is one of the key technologies in automation equipment after handling the material, along with automatic weighing, packaging technology to improve the development and performance indicators, for stacking technology also put forward higher requirements. Palletizing robot arm should have a certain rigidity and strength to prevent the elastic deformation and fracture. Wrist carrying something heavier, which put a higher demand for its accuracy. To meet the automated production line product handling and stacking requirements, the requirements of the subject of a structural part of the mechanical design palletizing robot. Combined with mechanical, electrical, software and hardware features and strengths of each on the basis of overall palletizing robot mechanical structure, transmission system analysis and design, a set of economical design

目 录
目 录 1
第一章 绪论 2
1.1 研究背景 2
1.2 国内外发展现状 2
1.3 论文研究意义和目的 2
1.4 本文主要研究内容 2
1.5 本章小结 2
第二章 总体方案设计 2
2.1 2
2.2 控制总体方案设计 2
2.2.1 伺服驱动系统要求 2
2.2.2 AC伺服电机工作原理 2
2.2.3 伺服控制方式选择 2
2.2.4 位置伺服系统 2
2.3本章小结 2
第三章 电气控制系统设计 2
3.1 主要控制部件选型 3
3.2 通信线路连接 3
3.3 接触屏与PLC的连接 3
3.4 PLC与伺服驱动器之间的连接 3
3.5 其他信号线路 3
3.6 电气连接 3
3.7 本章小结 3
第四章 控制流程设计 4
4.1 控制原理 4
4.2 控制流程 4
4.3 控制理论 4
4.4 本章小结 4
第五章 软件系统设计 4
5.1 运动控制流程 4
5.2 上位机接触屏软件开发 4
5.2.1 MCGS 开发软件介绍 4
5.2.2 上位机界面开发 4
5.3 本章小结 4
总结与展望 5
参考文献 5
附录 5
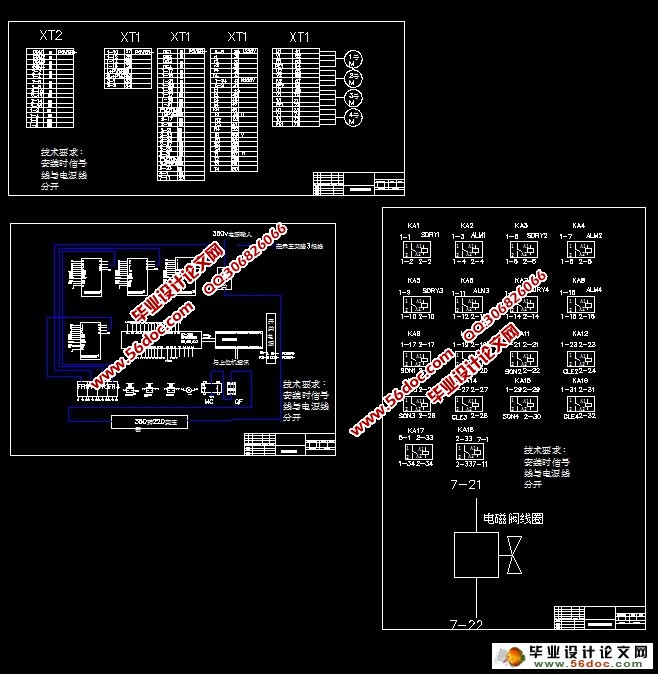
附录1.控制柜电气连线图 5
|
