ЖЭбЙЛњЩЯЯТСЯЛњаЕЪжЕФЛњаЕМАPLCПижЦЩшМЦ(КЌГЬађ,CADЬнаЮЭМзАХфЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D15904 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D15904
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЖЭбЙЛњЩЯЯТСЯЛњаЕЪжЕФЛњаЕМАPLCПижЦЩшМЦ(КЌГЬађ,CADЬнаЮЭМзАХфЭМ)(ТлЮФЫЕУїЪщ13600зж,CADЭМ7еХ)
The mechanical and control design of PLC manipulator under the forging press
еЊвЊ
БОЮФМђвЊНщЩмСЫЙЄвЕЛњЦїШЫЕФИХФюЃЌзщГЩКЭЗжРрвдМАздгЩЖШКЭзјБъаЮЪН,ВЂВћЪіСЫвКбЙММЪѕЕФЬиЕувдМАЦфдкЙњФкЭтЗЂеЙЕФЬиЕуКЭPLCПижЦЁЃ
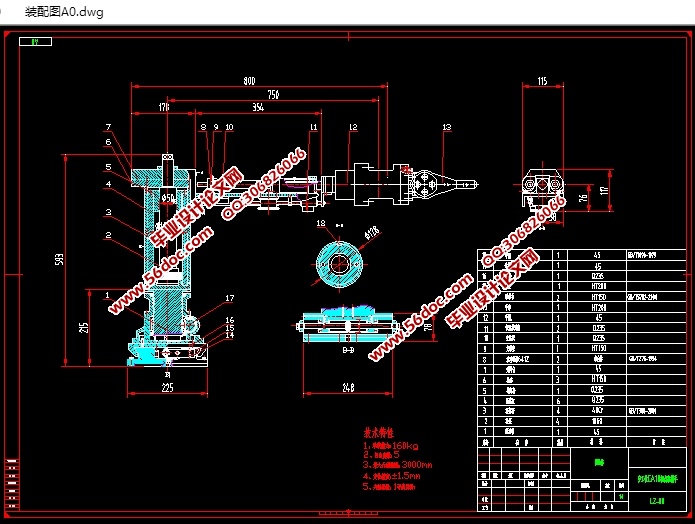
БОЮФЭЈЙ§ЖдЖЭбЙЛњШЁМўЛњаЕЪжНјаазмЬхЩшМЦЃЌШЗЖЈСЫЛњаЕЪжЕФзјБъаЮЪНКЭздгЩЖШЃЌШЗЖЈСЫЛњаЕЪжЕФММЪѕВЮЪ§ЁЃЭЌЪБЃЌЖдЛњаЕЪжЕФМаГжЪНЪжВПЁЂЪжЭѓНсЙЙНјааСЫНсЙЙЩшМЦЃЌМЦЫуГіСЫЪЙЫќУЧЖЏзїашвЊЕФХЄОиЃЌЭЌЪБЩшМЦСЫЛњаЕЪжЕФвКбЙЯЕЭГЃЌЛњаЕЪжЙЄзїЭМвКбЙЯЕЭГдРэЭМЃЌвКбЙЯЕЭГЕФЙЄзїдРэЭМЕФВЮЪ§ЛЏЛцжЦНјааСЫбаОПЃЌВЂЖдвКбЙЛњаЕЪжЫљЪЙгУЕФжсГаЃЌДЋЖЏжсЕШНјааСЫМЦЫуЃЌбЁдёБъзММўЁЃДѓДѓЬсИпСЫЛцЭМаЇТЪКЭЭМжНжЪСПЃЌетаЉдчЦкЕФЙЄзїЮЊКѓајЕФвКбЙЛњаЕЪжЕФЩшМЦзізуСЫГфЗжЕФзМБИЁЃ
БОЮФЫљЩшМЦЕФвКбЙЛњаЕЪждкКмДѓЗНУцЬсИпСЫЩњВњаЇТЪЃЌНкдМСЫЩњВњГЩБОЃЌЖдКѓајЕФЛњаЕЪжЕФбаОПКЭЗЂеЙвВгазХживЊЕФвтвхЁЃ
ЙиМќДЪ ЙЄвЕЛњЦїШЫЃЛЖЭбЙЛњЩЯЯТСЯЛњаЕЪжЃЛPLC
1.4 ПЮЬтЕФЬсГіМАжївЊШЮЮё
ИУЯюФПНЋЭъГЩЕФжївЊЙЄзїШчЯТЃК
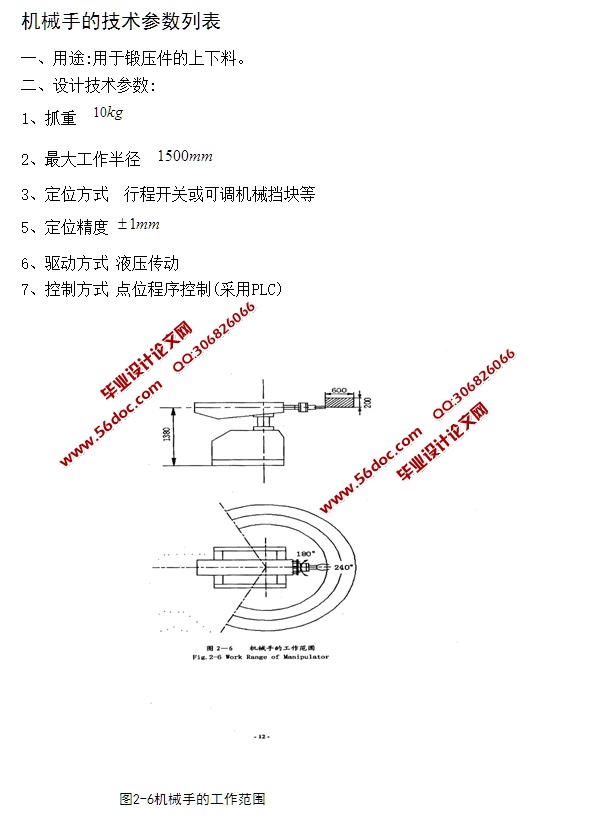
ЃЈ1ЃЉЮЊвКбЙЛњаЕЪжЃЌвђДЫЯрЖдгкзЈгУЛњаЕЪжЃЌЪЪгУУцНЯПэЁЃ
ЃЈ2ЃЉзјБъЪНЛњаЕЪжЕФздгЩЖШКЭбЁдёЁЃ
ЃЈ3ЃЉЩшМЦЛњаЕЪжЕФжДааЛњЙЙЃЌАќРЈЃКЩшМЦЕФЪжЃЌЪжЭѓЃЌЪжБлКЭЦфЫћВПЗжЁЃЮЊСЫЪЙвЛИіИќЭЈгУЕФЃЌвЛЗНУцжМдкШЁДњНсЙЙЃЌВЛНіПЩвдгІгУгкМаЪжжИЕФзЅШЁКЭЖЭМўЃЌвВПЩвдЮќЪеН№ЪєБЁАхЙЄМўЕФвКСїИКбЙГщгЭЪБЫљашвЊЕФаавЕЁЃ
ЃЈ4ЃЉвКбЙДЋЖЏЯЕЭГЕФЩшМЦ
БОПЮЬтНЋЛњаЕЪжвКбЙДЋЖЏЯЕЭГЕФЩшМЦЃЌАќРЈвКбЙдЊМўЕФбЁдёЃЌвКбЙЛиТЗЕФЩшМЦЃЌВЂЛцжЦвКбЙЯЕЭГдРэЭМЁЃ
ЃЈ5ЃЉбаОПСЫвКбЙДЋЖЏЯЕЭГдРэЭМЕФВЮЪ§ЛЏЛцЭМЃЌЬсИпЛцЭМаЇТЪЃЌЬсИпЛцЭМжЪСПЁЃ
ЃЈ6ЃЉЖдЛњаЕЪжПижЦЯЕЭГЩшМЦЁЃ
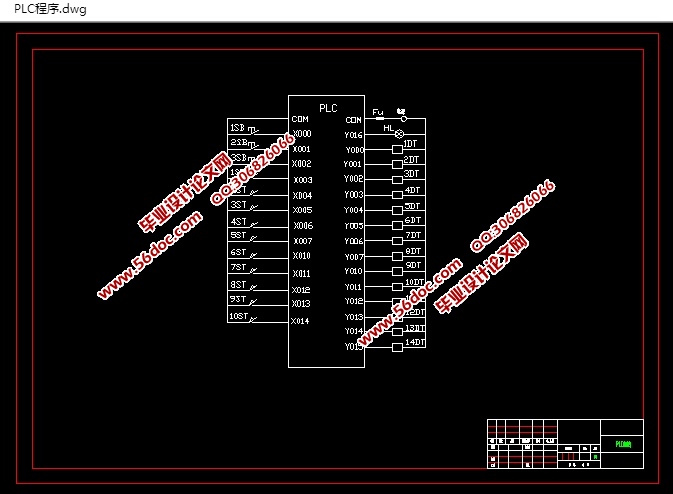
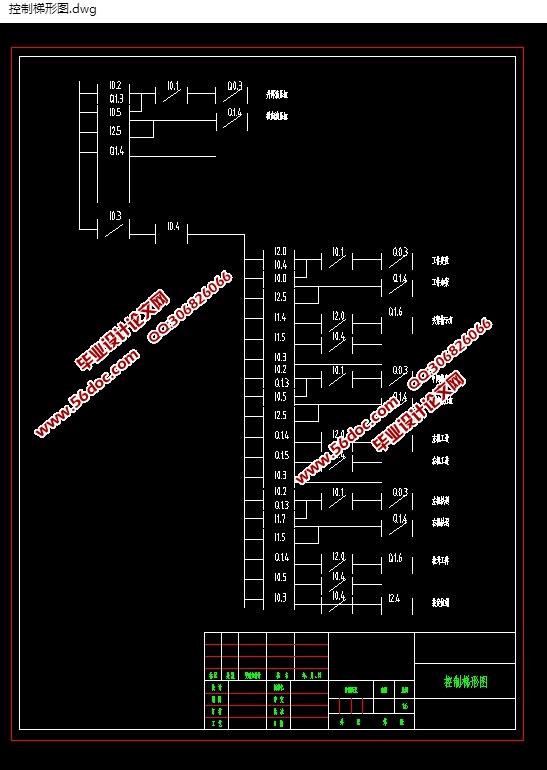
ЛњаЕЪжВЩгУПЩБрГЬПижЦЦїЃЈPLCЃЉПижЦЛњаЕЪжЃЌИУЯюФПНЋбЁдёPLCаЭКХЃЌИљОнЙЄзїСїГЬзщжЏЕФЛњаЕЪжЕФPLCГЬађЃЌВЂЛГіЬнаЮЭМЁЃ
ФП ТМ
1аїТл.....................................................................................................................1
1.1ЛњаЕЪжИХЪі...................................................................................................1
1.2ЛњаЕЪжЕФзщГЩКЭЗжРр...................................................................................2
1.2.1ЛњаЕЪжЕФзщГЩ.........................................................................................3
1.2.2ЛњаЕЪжЕФЗжРр…………………………………………….....................4
1.3ЙњФкЭтЗЂеЙзДПі.. .....................................................................................................7
1.4ПЮЬтЕФЬсГіМАжївЊШЮЮё……………………………………………….......8
2 ЛњаЕЪжЕФЩшМЦЗНАИ……………………………………………........................9
2.1ЛњаЕЪжЕФзљБъаЭЪНгыздгЩЖШ………………………………………..........10
2.2ЛњаЕЪжЕФЪжВПНсЙЙЗНАИЩшМЦ………………………………………..........11
2.3ЛњаЕЪжЕФЪжЭѓНсЙЙЗНАИЩшМЦ………………………………………..........13
2.4ЛњаЕЪжЕФЪжБлНсЙЙЗНАИЩшМЦ………………………………………..........14
2.5ЛњаЕЪжЕФжївЊВЮЪ§…………………………………………………..........18
2.6ЛњаЕЪжЕФММЪѕВЮЪ§СаБэ……………………………………………..........19
3 ЪжВПНсЙЙЩшМЦ……………………………………………...............................20
3.1МаГжЪНЪжВПНсЙЙ……………………………………………………..........21
3.1.1ЪжжИЕФаЮзДКЭЗжРр…………………………………………................22
3.1.2ЩшМЦЪБПМТЧЕФМИИіЮЪЬт……………………………………................22
3.1.3ЪжВПМаНєгЭИзЕФЩшМЦ………………………………………................22
4 ЪжЭѓНсЙЙЩшМЦ………………………………………………….......................22
4.1ЪжЭѓЕФздгЩЖШ………………………………………………………..........22
4.2ЪжЭѓЕФЧ§ЖЏСІОиЕФМЦЫу……………………………………………..........23
4.2.1ЪжЭѓзЊЖЏЪБЫљашЕФЧ§ЖЏСІОи…………………………………............23
4.2.2ЛизЊгЭИзЕФЧ§ЖЏСІОиМЦЫу……………………………………............23
4.2.3ЛизЊгЭИзЕФЧ§ЖЏСІОиМЦЫуаЃКЫ………………………........................23
5 ЪжБлЩьЫѕЃЌЩ§НЕЃЌЛизЊгЭИзЕФЩшМЦгыаЃКЫ………………………...............23
5.1ЪжБлЩьЫѕВПЗжГпДчЩшМЦгыаЃКЫ……………………………………..........24
5.1.1ГпДчЩшМЦ……………………………………………............................25
5.1.2ГпДчаЃКЫ…………………………………………….........................25
5.1.3ЕМЯђзАжУ…………………………………………….........................26
5.1.4ЦНКтзАжУ…………………………………………….........................27
5.2ЪжБлЩ§НЕВПЗжГпДчЩшМЦгыаЃКЫ……………………………….................27
5.2.1ГпДчЩшМЦ…………………………………………….........................27
5.2.2ГпДчаЃКЫ…………………………………………….........................27
5.3ЪжБлЛизЊВПЗжГпДчЩшМЦгыаЃКЫ…………………………………….........28
5.3.1ГпДчЩшМЦ…………………………………………….........................29
5.3.2ГпДчаЃКЫ…………………………………………….........................30
6 вКбЙЯЕЭГЩшМЦ……………………………………………................................31
6.1вКбЙИзЕФбЁаЭМЦЫу………………………………………….....................32
6.2вКбЙЯЕЭГдРэЭМЕФШЗЖЈ………………………….....................................33
7 ЛњаЕЪжЕФPLCПижЦЩшМЦ……………………………………………................34
7.1ПЩБрГЬађПижЦЦїЕФбЁдёМАЙЄзїЙ§ГЬ……………………………….........35
7.1.1ПЩБрГЬађПижЦЦїЕФбЁдё……………………………………….........36
7.1.2ПЩБрГЬађПижЦЦїЕФЙЄзїЙ§ГЬ…………………………………..........37
7.2ЛњаЕЪжПЩБрГЬађПижЦЦїПижЦЗНАИ…………………………………..........39
НсТл………………………………………………………………….....................40
жТаЛ…………………………………………………………………………….....41
ВЮПМЮФЯз………………………………………………………………………….42
|