基于PLC的盆花跳移机控制系统的设计(含原理图,梯形图程序)(开题报告,论文7400字,流程图,原理图,PLC梯形程序)
摘 要
盆花的温室种植和栽培是非常常见的盆栽植物生产方式,由于传统的盆花向温室内移动普遍采用手工操作或者单纯的皮带运输实现,系统的自动化程度低,运行可靠性也很差,无法适应现代化农业生产的需要。本文根据盆花移动的特点,在皮带运输机构的基础上设计了以立体运动机械夹手进行盆花的跳跃式移动的简单盆花跳移机构,在较小的作业空间内即可实现自动化盆花的移动和运输,是一种全新的盆花移动方案。本文在简单的运动方案设计的基础上,以PLC为主控器,重点进行了盆花跳移机构控制系统的设计。
盆花跳移机的控制系统采用西门子S7-200系列PLC作为主控CPU,通过多个接近开关和气缸以及皮带运输电机以及手爪运动电机的驱动实现整个盆花的跳移操作,跳移过程分为三个循环动作,在一个全循环周期内可以实现9盆盆花的移动,在本系统的基础上稍作扩展即可实现更多盆花的同时移动,系统的功能强大,实用性很强。
根据跳移机构的运动方案,对系统的工作流程进行了设计,并以工作流程图为基础,对PLC的梯形图逻辑程序进行编制,通过西门子S7-200软件仿真,结果表明,梯形图逻辑完全符合盆花跳移机构的工作要求。
关键词:盆花跳移;PLC;控制系统;PLC应用
Abstract
Potted greenhouse planting and cultivation of potted plants is a very common mode of production, because of the traditional flower to the temperature of indoor mobile commonly used manual operation or belt transport alone, the degree of automation is low, the reliability is poor, unable to adapt to the needs of modern agricultural production. According to the characteristics of flower movement, based on the design of the belt transport mechanism of simple hopping to three-dimensional flower movement of mechanically hand potted jumping mechanism in smaller working space can realize moving and transportation automation is a potted flower, a new mobile solution. Based on the simple motion scheme design on PLC based controller, focusing on the design of potted jumping mechanism control system.
The control system adopts SIEMENS S7-200 machine jump flower series PLC as the main control CPU, through a plurality of switches and cylinder and motor driving belt transport and hand motion motor realize the whole flower jumping, jumping process is divided into three cycles, in a full cycle can move 9 pots of potted plant and on the foundation of this system can realize a more extended flower while the mobile system, powerful, very practical.
According to the motion scheme of jump shift mechanism, the workflow of the system are designed, and the working flow chart based on PLC ladder logic programs are compiled by SIEMENS S7-200 software simulation, the results show that the ladder logic jumping mechanism fully meet the work requirements of potted plant.
Key word : Flower jumping; PLC; control system; PLC application
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 本课题的研究背景和意义 1
1.2 本文的主要研究内容 1
第2章 盆花跳移机的运动方案设计 3
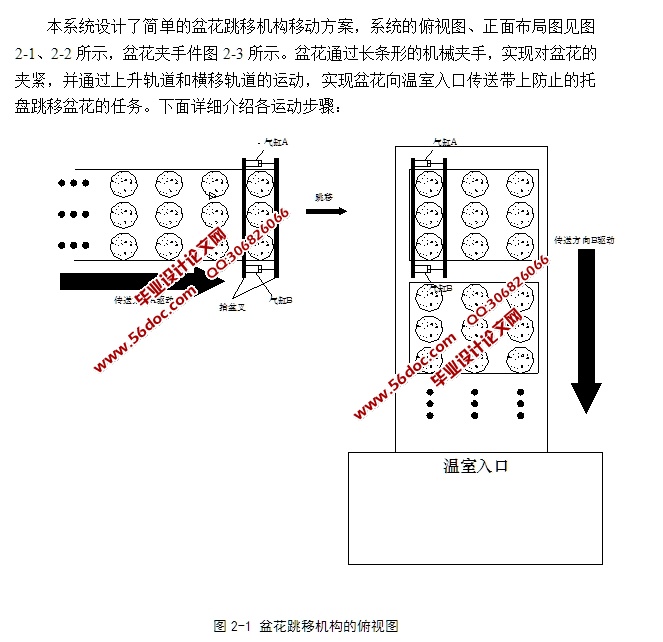
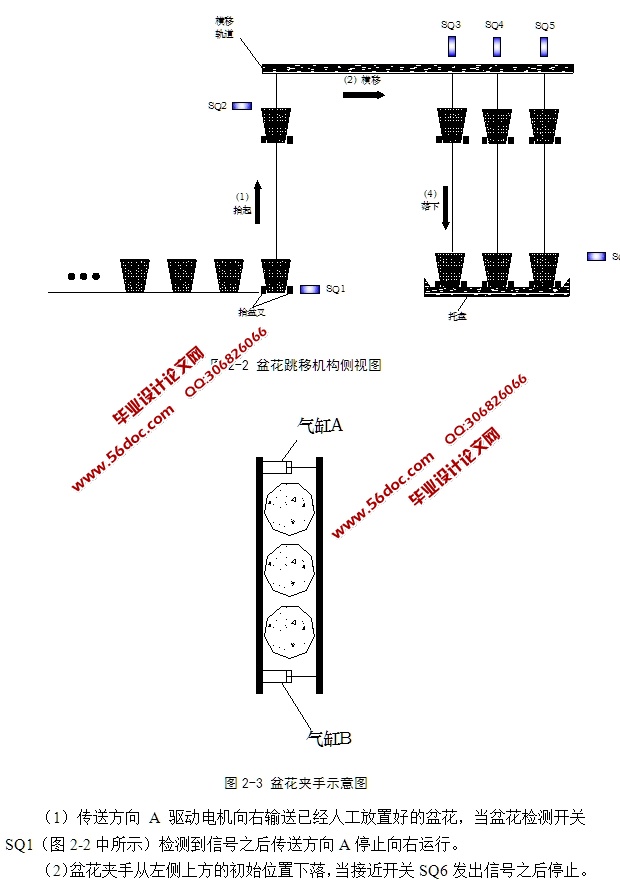
2.1 盆花跳移系统平面布局 3
2.2 跳移系统的控制对象 5
2.3 控制系统的设计思路 6
2.4 本章小结 6
第3章控制系统的硬件电路设计 7
3.1 PLC选型及I/O信号地址分配 7
3.1.1 PLC的选型 7
3.1.2 PLC外围I/O地址规划设计 8
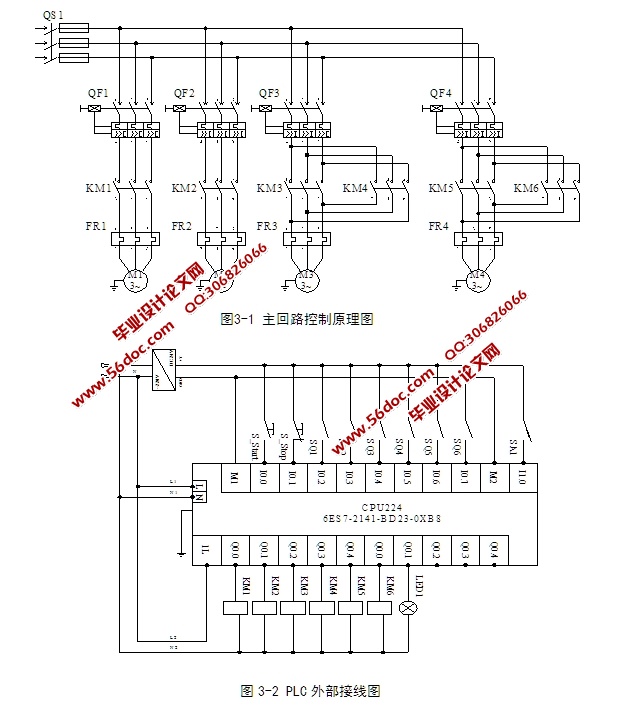
3.2 电气控制原理图设计 8
3.2.1 配电系统主回路原理图设计 8
3.2.2 控制系统原理图设计 9
3.3 本章小结 10
第4章 控制系统的软件设计 11
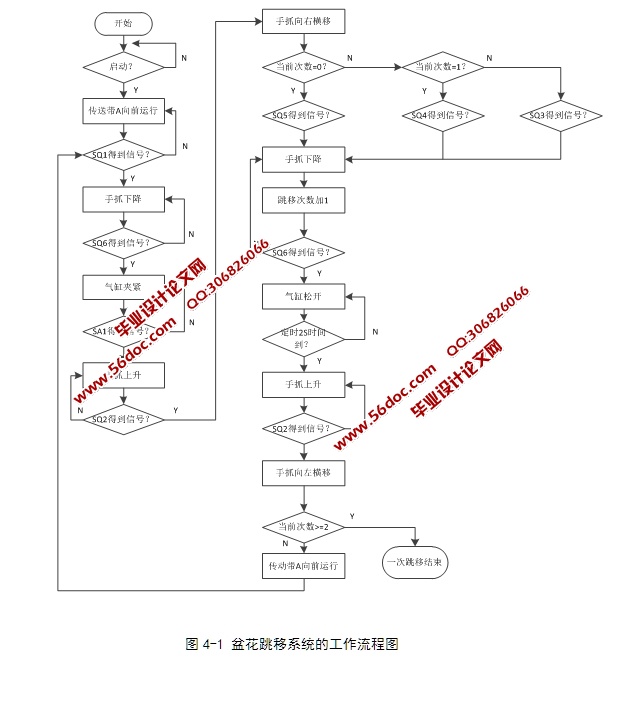
4.1 控制系统的流程图 11
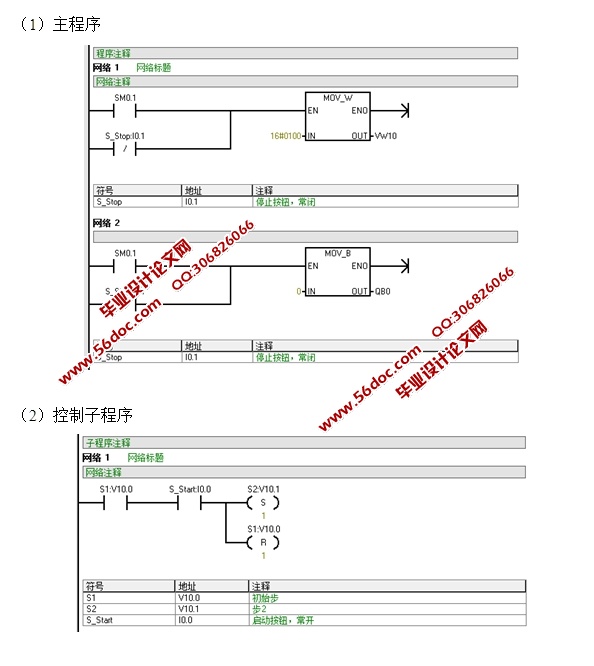
4.2 梯形图程序编程 12
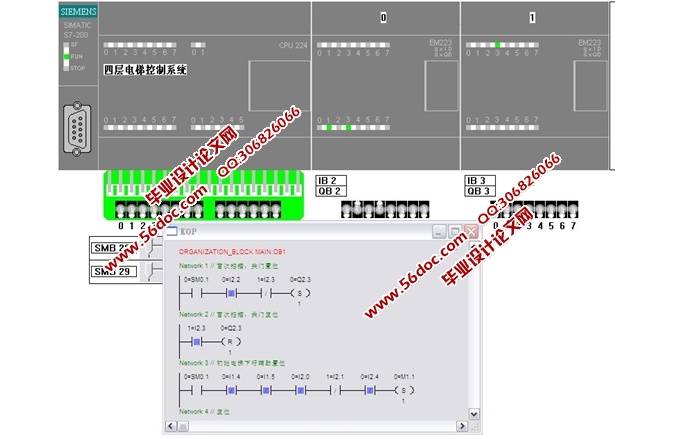
4.3 程序的仿真验证 12
4.3.1 程序的导出 12
4.3.2 程序的仿真测试 12
4.5 本章小结 13
结 论 14
参考文献 15
致 谢 16
附录 I 梯形图程序 17
|