机械手上下料系统方案设计(含CAD图,PLC程序)(任务书,开题报告,论文说明书10400字,CAD图纸6张,PLC程序)
摘要
在人类的机械工业发展史上,自动线和机械手留下了浓重的一笔,它们以效率高,适应性强等特点正在逐步代替人工劳动。作为自动线和机械手控制的核心,PLC则决定他们的工作效率和精确度。经过多年的发展,PLC已取得了长足的进步。
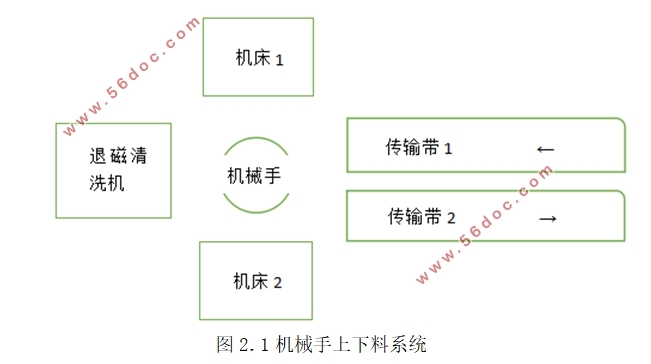
这次的毕业设计中,本论文主要研究了以西门子公司的PLC为核心的机械手上下料自动线控制系统。在该系统中PLC软件与硬件配合实现自动控制系统,本论文是基于PLC的应用技术,在论文中将用PLC控制传输带的起停,防护门的开关,机床的加工控制,机械手的抓放动作。我将系统分为三大部分:传输带、机械手抓取、机械手放料。
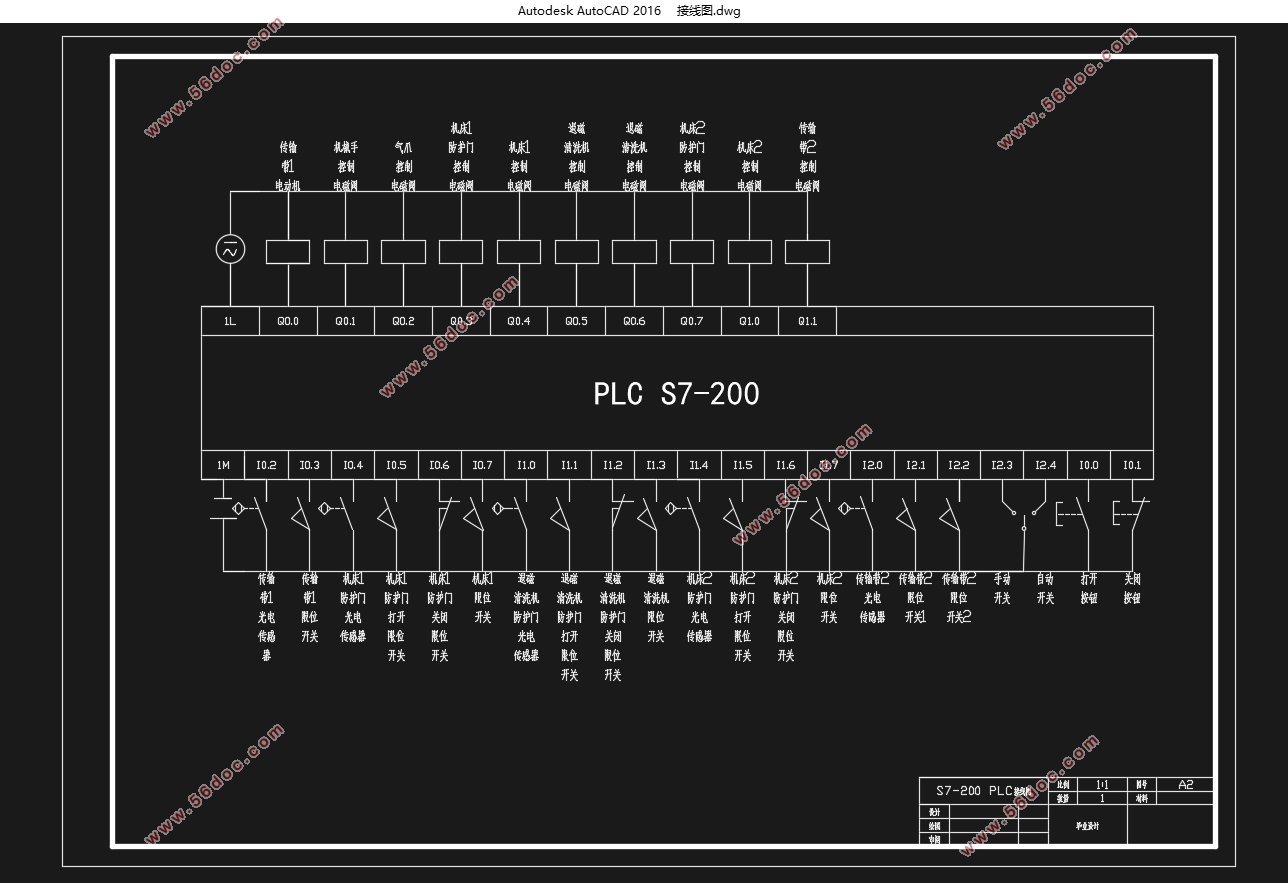
在程序设计完成之后,还要用CAD画出系统中PLC的接线图以及控制电路图。
关键词:自动线 机械手 PLC CAD
Abstract
In the history of human's mechanical industry development,Automatic wire and mechanical hand left a heavy,with high efficiency, adaptability and other characteristics, they are gradually replacing the manual labor.As the core of the automatic line and manipulator, PLC determines their work efficiency and precision. After many years of development, PLC has made considerable progress.
This graduation project, this paper mainly studies the SIEMENS company's PLC as the core of the mechanical hand and automatic wire control system.In the system of PLC software and hardware with the realization of automatic control system. This paper is based on the application of PLC technology, the paper will use of PLC control transmission band stop, door switches, control the machining, mechanical hand grasp action.I will be divided into three parts: the transmission belt, mechanical hand grab, mechanical hand release.
After the completion of the program design, the use of CAD to draw the system in the PLC wiring diagram and control circuit diagram.
Key words: Automatic line; Manipulator; PLC; CAD
目录
摘要 I
Abstract II
第一章 引 言 1
1.1 课题研究背景 1
1.2 课题研究的科学意义及目的 1
1.3 课题研究内容 2
1.4 本章小结 2
第二章 机械手抓取自动线及控制方案确定 3
2.1 抓取机械手 3
2.2 自动线 4
2.3 控制方案确定 4
2.4 本章小结 6
第三章 设备及元器件的选型 7
3.1 PLC 7
3.1.1 PLC的定义 7
3.1.2 PLC的分类 7
3.1.3 PLC的工作原理 9
3.1.4 PLC的构成 10
3.1.5 PLC的优点 10
3.2 行程开关、光电开关和按钮 11
3.2.1 行程开关 11
3.2.2 光电开关 12
3.2.3 按钮 12
3.3 电动机、接触器和继电器 12
3.3.1 电动机 12
3.3.2 继电器 12
3.4 本章小结 12
第四章 控制系统设计 14
4.1 硬件的设计 14
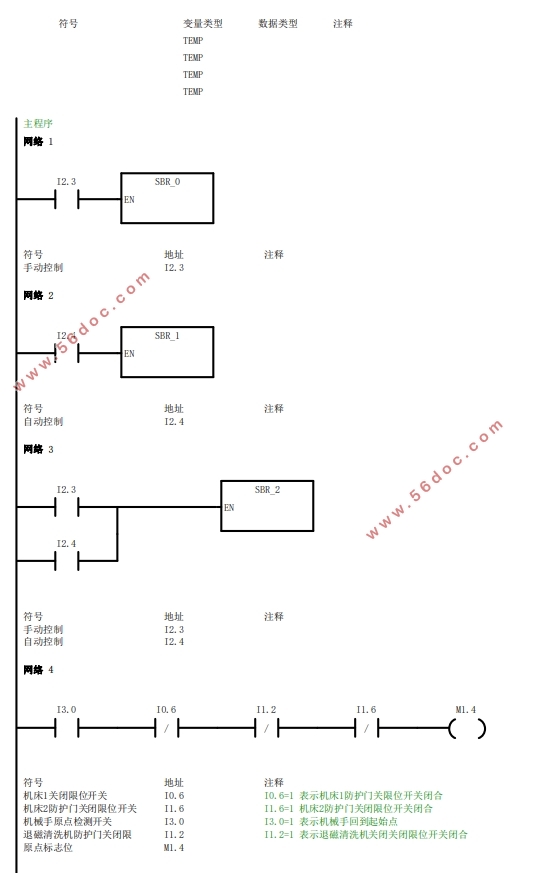
4.2 软件的设计 14
4.2.1 PLC选型 14
4.2.2 I/O分配 15
4.2.3 控制系统的外部接线图 17
4.3 传输带1系统PLC控制程序设计 17
4.3.1 传输带1控制过程分析 17
4.3.2 传输带1PLC程序设计 18
4.4 机械手抓料系统程序设计 18
4.4.1 机械手抓料控制过程分析 18
4.4.2 机械手抓料PLC程序设计 18
4.5 机械手放料系统程序设计 19
4.5.1 机械手放料系统分析 19
4.5.2 机械手放料PLC程序设计 19
4.6 机床加工系统程序设计 21
4.6.1 机床加工系统分析 21
4.6.2 机床加工PLC程序设计 21
4.7 传输带2系统程序设计 21
4.7.1 传输带2系统分析 21
4.7.2 传输带2PLC程序设计 21
4.8 本章小结 22
第五章 总结与展望 23
5.1 总结 23
5.2 展望 23
参考文献 24
致谢 26
|
