使用球形五杆的空间自适应手指抓取器机构设计
来源:56doc.com 资料编号:5D24250 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D24250
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
使用球形五杆的空间自适应手指抓取器机构设计(中文5000字,英文PDF)
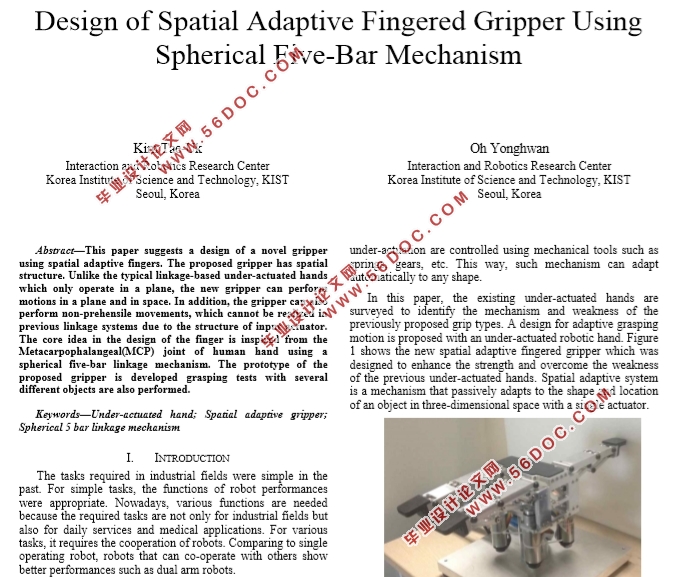
摘要:提出了一种新型夹具的设计方案采用空间自适应手指,该夹具具有空间特性结构。不像典型的基于链接的欠驱动手,前者只能在飞机上操作,新的夹持器却能做到在平面和空间中的运动。此外,抓手也可以执行由于以前的联动系统输入执行机构的结构导致的不能缠绕的动作。手指设计的灵感来自于人手部掌指关节,其核心理念是球面五连杆机构。本文提出的该机构的原型夹具是用几种夹具组合,进行还将执行抓握不同的对象的试验。
关键词:欠驱动手;空间自适应夹持器;球面5连杆机构
工业领域所需的任务很简单,对于简单的任务,机器人的功能表现是合适的。如今,需要各种各样的功能,因为所要求的任务不仅是工业领域的,而且也可用于日常服务和医疗应用任务,它需要会操作的机器人,能与他人合作的机器人,拥有更好的性能,如双臂机器人。
机械臂是高精度,高速点胶机器手。对应小批量生产方式,提高生产效率。除点胶作业之外,可对应uv照射,零件放置,螺丝锁定,电路板切割等各种工作。而机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
|
