基于多视图的无监督联合对象分类和视角估计
来源:56doc.com 资料编号:5D24065 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D24065
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于多视图的无监督联合对象分类和视角估计(中文5000字,英文PDF)
摘要
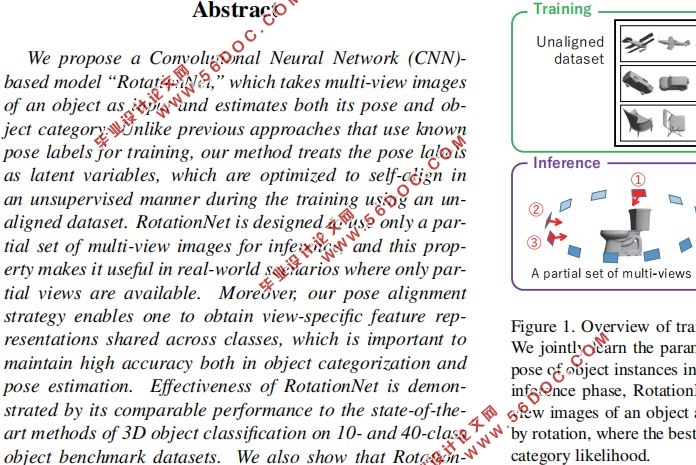
我们提出了一种基于卷积神经网络的模型:RotationNet。它以一个目标的多视角图像作为一个输入,并且可以联合估计他的视角和类别。不同于以往的方法中用已知的视角标签来训练,我们的方法把视角标签作为潜在变量,通过对一个未对齐的数据集进行无监督学习中来获得。RotationNet被设计为可以使用一部分多视图图像进行预测,该属性在只有部分视图可用的实际场景中非常有实用价值。RotationNet的有效性是通过其优异的性能表现——其在3D对象分类的10类和40类的数据集ModelNet上被证实为目前最先进的方法。我们还表明,即使训练时没有已知视角,RotationNet也可以在对象姿态估计数据集上实现最先进的性能。
|
