基于运动恢复结构的3D重构算法研究
来源:56doc.com 资料编号:5D25856 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D25856
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于运动恢复结构的3D重构算法研究(任务书,开题报告,论文说明书12000字)
摘要
人类感知外界信息,80%是通过视觉获取的,3D重构是计算机视觉最重要的研究问题之一。它是通过研究物体的二维信息,来推导出其三维信息的技术。
本文研究利用手机采集的刚性物体图像序列,通过对图像序列的特征提取、估计相机运动、标定相机等步骤恢复出刚性物体三维模型,同时利用相机成像原理以及场景结构先验信息,提高重建算法的准确度。使用运动恢复结构方法需要的成本很低,只需要多个重叠的照片作为输入,用于特征提取和三维重建算法,同时大量的数据采集降低了用户的监督耗时和所要求的专业知识。
本文主要分析了图像特征点提取算法,研究现有三维重建技术的特点,重点研究采用运动恢复结构算法原理,加速重建效果,改善重建质量。
关键词 :运动恢复结构,特征提取,三维重建
Abstract
Human perception of external information, 80% is acquired by visual, 3-D reconstruction is one of the most important research problem in computer vision. It is a 2-D object by studying information technology to derive the 3-D information.
In this thesis, we study the rigid image sequence acquired by phone, through the feature extraction of image sequence, estimation camera movement, camera calibration and other steps to restore the 3-D rigid object model, while taking advantage of the camera imaging geometry and scene structure prior information to improve the reconstruction algorithm accuracy. The cost of the algorithm is very low, only a plurality of overlapping photos as input for feature extraction and 3-D reconstruction algorithm, while a large number of time-consuming data collection reduces the oversight and expertise required by the user.
The thesis analyzes the image feature extraction algorithm to study the characteristics of the current 3-D reconstruction technology, focusing on the principle of the use of motor recovery algorithm structure, accelerate reconstruction results in improving the quality of reconstruction.
Keywords: SFM,Feature Extraction,3-D reconstruction
1.3 研究内容和论文结构
本文主要研究利用采集的刚性物体图像序列,通过对图像序列的特征提取、估计相机运动、标定相机等步骤恢复出刚性物体三维模型,同时利用相机成像几何以及场景结构先验信息,提高重建算法的准确度
本问分为五章,每章的内容安排如下:
第一章 绪论。从研究的背景、国内外研究现状入手,概述本文的主要工作,并介绍了全文的安排,内容分配及侧重点。本章是对全文的概述,讲述了本文的工作内容,本文的目的是什么,意义何在。
第二章 三维重建理论知识。主要讲解了射影几何的相关知识和相机成像原理和相机标定,进行三维重建涉及到了许许多多方面的知识,首先是相机成像知识,这又关系到射影几何,然后是对图像进行处理的技术,SFM算法,PMVS算法等等。最后是编程能力,写好Android程序并实现出来
第三章 特征点的提取和匹配。本章是进行三维重建的第一步,也是第一步的算法介绍,讲述了特征点的定义,提取和匹配。主要分析了两种特征提取算法,基于角度的算法和SIFT算法,这是进行三维重建过程的基础,本文研究的就是特征点的提取,并恢复其三维坐标。
第四章 三维重建。这是本文的重点章节,主要讲解了系统的工作流程,输入,数据传输过程,输出,最后得到三维模型,最后展示三维重建的结果,与实际的结果进行比较。
第五章 总结。总结全文的工作,然后之处本系统的缺点和优点,并就本次设计中遇到的困难,进行总结,自己的心得,体会等等。
目录
第1章 绪论 1
1.1 课题研究背景 1
1.2 国内外研究现状 1
1.3 研究内容和论文结构 2
第2章 三维重建理论知识 4
2.1 射影几何基础 4
2.1.1 射影空间 4
2.1.2 齐次坐标 5
2.1.3 射影不变量 5
2.2 摄像机成像原理 5
2.2.1 参考坐标系 5
2.2.2 摄像机模型 7
2.3 相机标定 7
第3章 特征提取 9
3.1 概述 9
3.2 特征点提取算法 9
3.2.1 Harris特征点提取原理 9
3.2.2 SIFT方法 10
3.3 特征点的匹配 11
3.3.1 常规方法 11
3.3.2 SIFT匹配方法 12
第4章 基于运动恢复结构的三维重建 14
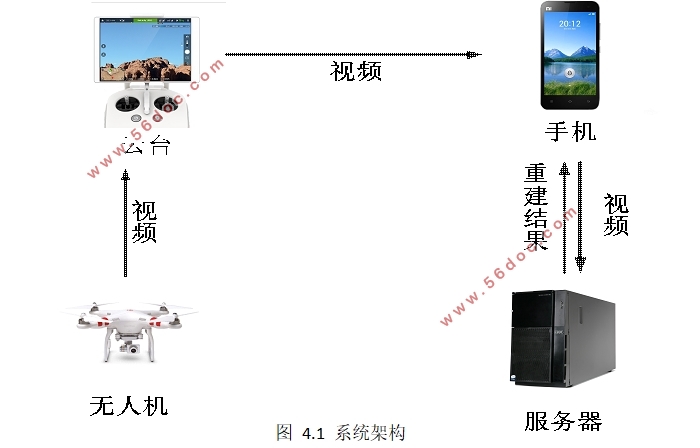
4.1 系统架构 14
4.2 系统工作流程 14
4.3 App运行展示 25
第5章 总结 27
5.1 工作总结 27
5.2 收获及心得 27
参考文献 29
致谢 31
|