校园垃圾拾捡机器人控制机构设计(CAD图纸和三维Proe)包含任务书,答辩幻灯片ppt,毕业设计说明书7500字.
摘要
随着经济的快速发展和人民生活水平的日益提高,垃圾排放量与日俱增,对环境的压力越来越大,特别是校园这种人口密集的地方,每天都在制造大量的垃圾,如废纸、塑料、废电池、果皮等。为了让校园保持清洁就必须要费大的人力物力和财力等。
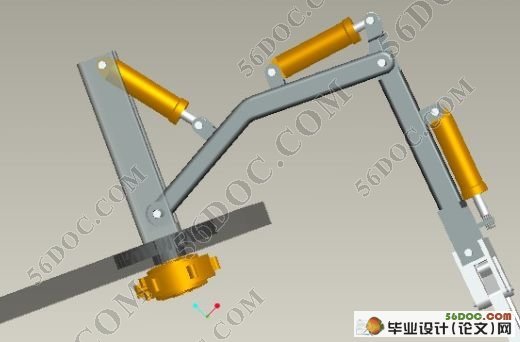
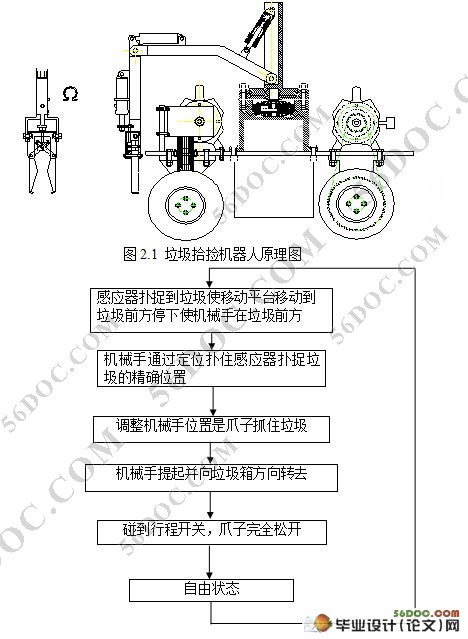
如果设计一种校园拾捡垃圾机器人就可以解决很大的麻烦, 校园捡垃圾机器人机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。捡垃圾机械手是由全液压控制,机械手固定在移动平台上构成的一类特殊的移动机器人系统。其中机械手用来实现如抓取、操作等动作,平台的移动用来扩展机械手的工作空间,使机械手能以更合适的姿态执行任务,机械手的加入也极大的提高了移动机器人的性能。
关键词: 校园;垃圾拾捡机器人;控制机构。
Abstract
With the rapid economic development and increasing people's living standards, waste emissions by increasing the pressure on the environment increasing, Specially campus this kind of densely population place , every day is making massive trash , such as waste paper, plastics, batteries, fruit, etc. . In order for the campus must be kept clean on the charges of human material and financial resources and so on.
If you design a campus that is garbage robot can solve a lot of trouble, the campus garbage robot is a robot environment-aware, dynamic decision-making and planning, such as acts of control and the implementation of multiple functions in one integrated system. Manipulator garbage from the entire hydraulic control, mechanical hand fixed in the mobile platform consisting of a special kind of mobile robot system. Manipulator which is used to achieve, such as crawling, operation moves to expand mobile platform, manipulator of the working space, so that robot can be a more appropriate gesture tasks, the addition of robot is also greatly improved the performance of the mobile robot
Key words : campus ; Trash ascends to pick the robot ;Control mechanism
目录请看下一页
|